東邦大学医療センター大森病院 呼吸器内科 高井雄二郎准教授と東京工業大学 工学院 システム制御系 塚越秀行准教授の研究チームは、1本の極細構造のチューブ内に流体圧を印加することにより、ミミズのような蠕動(ぜんどう)運動を生成する仕組み(Mono-line Drive)を開発しました。
この仕組みを用いることによって、将来、気管支内を自走して肺内の目標の病変まで自動的にたどりつき、病変の採取や治療が行えるオートガイド・ロボットの開発を目指します。
この研究成果は2017年5月10日(水)~13日(土)に開催された「ロボティクス・メカトロニクス 講演会 - 2017 in Fukushima」で発表され、特許2件を出願しています(特願2016-024614、特願2017-092605)。
背景
肺がんを代表とする呼吸器疾患において、診断および治療の精度を高めるためには、肺内病変の生体検査が不可欠です。現在は気管支鏡検査による用手的生検を行っていますが、気管支の分岐が末梢に行くほど多岐かつ細くなるため、それを確実に選択し推進する微細な移動調整が難しいという課題があります。施行医による技術差もあり、確実に病変に生検鉗子を到達させることが難しく、診断精度が十分とは言えません。
Mono-line Driveについて
気管支内視鏡で十分な検査を行うためには、肺内の目標まで確実に到達させることのできる器具と仕組みの開発が必要ですが、そのために克服すべき課題とされているのが、極細で分岐が多岐に渡る気管支内でも生検鉗子を確実に目標に進められる仕組みでした。
今回開発したMono-line Driveは、1本のチューブ内への加減圧だけで複数のチャンバーに進行波を生成するように設計されており、これにより、気管支のような極細な構造の中を蠕動(ぜんどう)運動で進むことが可能となりました。Mono-line Driveには、推進方向を選択するための湾曲機能や、管路径の変化に適応するための屈曲推進機能も搭載されており、気管支モデルを用いてこれらの有効性を確認しました。
Clik here to view.
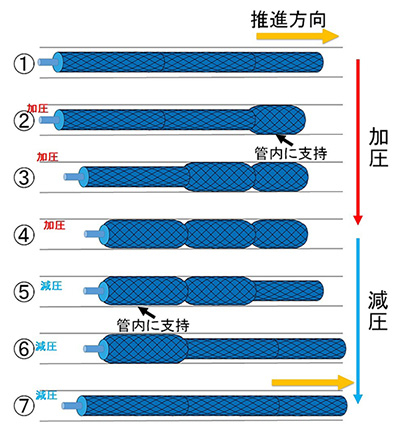
図1. Mono-line Driveの動作原理
Clik here to view.
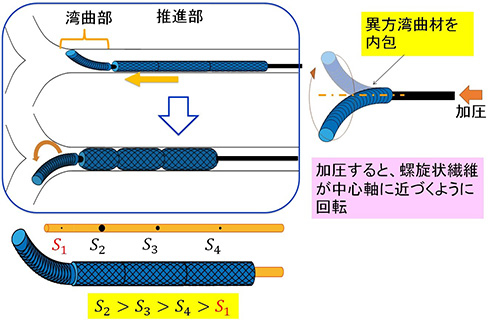
図2.分岐部での方向操舵
Clik here to view.
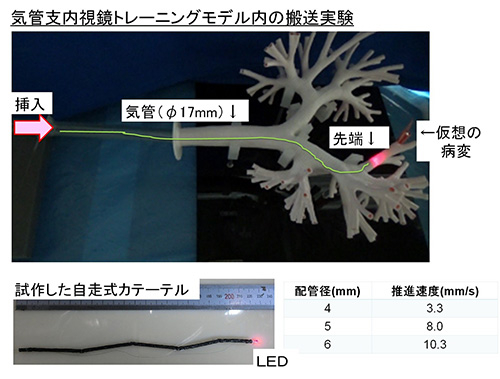
図3. 気管支モデル内の搬送実験
今後の展開
推進可能な分岐確度の拡大や、カメラ等を搭載し気管支内部の情報収集等を行い、生体検査や治療に活用できる機能の開発と、器具の実用化を目指します。
この研究成果は2017年5月10日(水)~13日(土)に開催された「ロボティクス・メカトロニクス 講演会 - 2017 in Fukushima」で発表され、特許2件を出願しています(特願2016-024614、特願2017-092605)。
- プレスリリース 気管支内の診断精度向上を目指して ―東邦大学と東京工業大学の研究チームが共同で自走式カテーテルを開発―Image may be NSFW.
Clik here to view.
- 塚越研究室
- 研究者詳細情報(STAR Search) - 塚越秀行 Hideyuki Tsukagoshi
- 工学院 システム制御系
- 東邦大学
- 研究成果一覧

Image may be NSFW.
Clik here to view.
工学院 ―新たな産業と文明を拓く学問―
2016年4月に発足した工学院について紹介します。
学院・系及びリベラルアーツ研究教育院Image may be NSFW.
Clik here to view.
お問い合わせ先
東邦大学医療センター 大森病院 呼吸器内科
高井雄二郎 准教授
E-mail : ytakai@med.toho-u.ac.jp
Tel : 03-3762-4151 / Fax : 03-3762-4151
東京工業大学
工学院 システム制御系/システム制御コース
塚越秀行 准教授
E-mail : htsuka@cm.ctrl.titech.ac.jp
Tel : 03-5734-3724 / Fax : 03-5734-3724
本リリースの配信元
東邦大学 法人本部経営企画部
E-mail : press@toho-u.ac.jp
Tel : 03-5763-6583 / Fax : 03-3768-0660
本リリースの配信元/取材申し込み先
東京工業大学 広報・社会連携本部 広報・地域連携部門
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661