概要
東京工業大学大学院総合理工学研究科メカノマイクロ工学専攻の高山俊男准教授は、複数のチューブを螺旋状に束ねるだけで製作可能な「管内推進装置」を開発した。
研究の背景
身の回りには様々な管があり、これらは定期的なメンテナンスを必要とする。管内の検査には内視鏡が有効であるが、細く曲がった管の奥まで入れることが難しく、管内推進装置が求められている。
研究成果
2本の柔軟なシリコーンチューブを伸びない糸を挟んで接着し、1本に空気圧をかけて伸ばすと、伸びたチューブが外側にくるような円弧形状に変形する。この原理を応用して、3本の柔軟なシリコーンチューブを伸びない糸を中心に螺旋状に束ねて互いに接着し、1本に空気圧をかけて伸ばすと、伸びたチューブが外側にくるような螺旋形状に変形する。3本のチューブを順に加圧すると、おなじ螺旋形状のまま外側になるチューブが順に入れ替わる。すなわち螺旋形状を維持したまま、体軸を中心とした回転運動を行う螺旋捻転運動となる。これを管内で行なうと、胴体が管内壁に斜めに押し付けられたまま回転運動を行うため、螺旋状の軌跡を描いて推進する。柔軟な構造であるため特に複雑な制御をしなくても屈曲部を容易に通過できる。外径6mmの寸法の試作機で内径9mmから25mmの管を移動可能で、内径20mmの管で最大毎秒45mmで移動可能であった。また接着時に束ねる螺旋の捻じれ角度によって変形可能な最大直径が変わることも確認した。
今後の展開
安価であるため汚れた環境下で使い捨てにでき、密閉性が高く電気も使わないため可燃性のガスのある管内で利用でき、生体内で利用できる可能性もある。今後、実用化のために、物理モデルを構築して変形可能な最大直径を予測し、目的に応じた推進装置の設計手法を求める予定である。
Clik here to view.
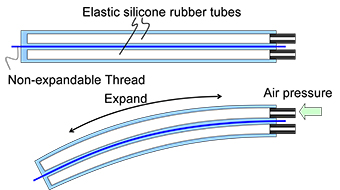
図1. 2本のチューブによる基本原理
Clik here to view.
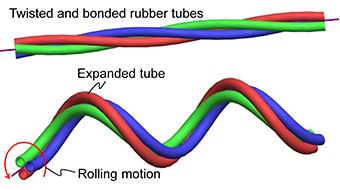
図2. 3本のチューブを螺旋状に束ねて1本を加圧した場合
Image may be NSFW.
Clik here to view.
図3. 螺旋捻転運動の転がる方向と装置先端の描く軌跡
Clik here to view.
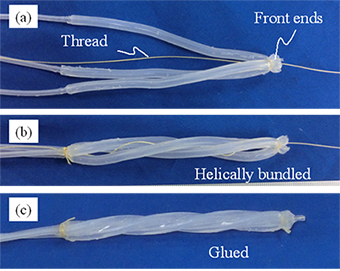
図4. 螺旋捻転管内推進装置の作り方
Clik here to view.
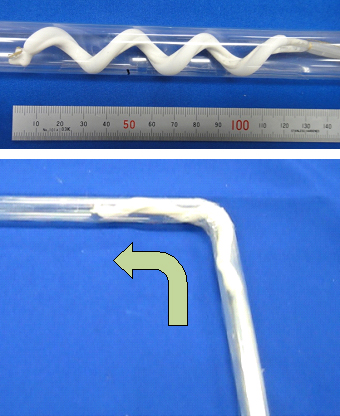
図5. 管内推進の様子(屈曲部も容易に通過可能)
論文情報
掲載誌 : |
IEEE/ASME Transactions on Mechatronics |
論文タイトル : |
A twisted bundled tube locomotive device proposed for in-pipe mobile robot |
著者 : |
高山俊男、竹島啓純、堀智之、小俣透
|
DOI : |
10.1109/TMECH.2015.2411752 Image may be NSFW. Clik here to view.  |
問い合わせ先
大学院総合理工学研究科 メカノマイクロ工学専攻
准教授 高山俊男
Email : takayama@pms.titech.ac.jp
Tel : 045-924-5468 / Fax : 045-924-5468