要点
- エラストマー薄膜上の任意の微細溝パターンに沿って筋細胞を配列させたバイオアクチュエータを開発。
- 筋細胞の配列を制御することで、心筋や括約筋に見られるひねりなどのユニークな筋肉の収縮挙動を再現。
- 生体特有の複雑な動きを再現するソフトロボットや臓器チップ開発への応用が期待。
概要
東京工業大学 生命理工学院 生命理工学系の藤枝俊宣准教授、三田博亮大学院生、水野陽介研究員(研究当時)らの研究チームは、同 工学院 機械系 田中博人准教授と共同で、エラストマー薄膜に任意のパターンの微細溝を形成することで、筋細胞を任意の方向に配列させた薄膜状のバイオアクチュエータ[用語1]を開発し、生体内の筋組織に類似した収縮挙動を再現することに成功した。
バイオアクチュエータは、細胞を動力源とするソフトロボット[用語2]の一種であり、軽量性・柔軟性・エネルギー効率の観点から筋細胞が用いられてきた。筋細胞を動力源として用いるためには、生体組織のように筋細胞を配列させる必要がある。しかし、筋細胞の配列手法は直線のような単純なデザインに留まっており、簡便かつ自在な細胞配列手法の開発や、配列制御に基づく複雑な収縮運動の再現が求められてきた。
研究チームは、高速かつ簡便に微細構造を形成可能なUVレーザー加工[用語3]に着目し、微細溝パターン(溝幅: 20 µm)を施したポリイミド基板をテンプレートとして、微細溝パターンが転写されたエラストマー[用語4]製の柔らかい薄膜(厚さ:約9 µm)を作製した。この時、直線状、曲線状(曲率: 0.1-0.2 /mm)、同心円状(半径: 10 mm)の微細溝パターンを形成することで、マウス骨格筋組織由来の筋細胞をパターン通りに配列させることに成功した。さらに、そうした微細溝パターンを用いて筋細胞を配列させたバイオアクチュエータ(寸法: 12×15 mm)は、「ひねり」様の収縮挙動(最大収縮変位: 3.3 mm)を示すことを発見した。
本研究成果は、心筋や括約筋に見られるような異方的な組織配列の再現に有用であり、生体特有の複雑な動きを再現するソフトロボットや、薬剤試験のための臓器チップ[用語5]の開発への応用が期待される。
本研究成果は、日本時間2月9日付のIOP Publishing発行「Biofabrication」誌に掲載された。
背景
ソフトロボットは、柔軟性を有する材料により構成されるロボットの総称であり、硬質な金属からなる従来の硬いロボットとは異なり、柔軟性を活かした形状や生体様の柔らかな動きを特徴とする。ソフトロボットの中でも、柔軟性を有する材料と細胞・組織を組み合わせたバイオハイブリッドロボットは、生物に近い柔らかい動きの再現やその仕組みの解明に有用である。特に、筋細胞を動力源とするバイオアクチュエータは、軽量かつ柔軟でエネルギー効率に優れるため、ソフトロボットの駆動力としても期待されてきた。
筋細胞を動力源として用いるためには、生体組織のように筋細胞を異方的に配列させる必要がある。しかし、これまでに筋細胞の直線的な配列手法以外の報告例は少なく、配列制御に基づく生体特有の複雑な動きの実現は困難であった。こうした課題に対して、近年では細胞培養基材への骨格構造の導入や、筋細胞の配置の工夫をおこなったバイオハイブリッドロボットやバイオアクチュエータが報告されているが、生体特有の複雑かつ異方的な筋組織の構造を模した筋細胞の配列化手法や、これを利用したバイオアクチュエータに関する報告はほとんどない。
そこで研究グループは、微細溝パターンを有する細胞培養基材を作製し、筋細胞の配列を自在に制御することで、曲げやひねりを組み合わせた複雑な動きを示すバイオアクチュエータにより、これらの課題を解決することを目指した。具体的には、迅速かつ簡便に任意のパターニングが可能なUVレーザー加工機を用いて、柔軟性のあるエラストマー薄膜上に曲線状の微細溝を付与することで、任意の方向に配列された骨格筋細胞とエラストマー薄膜からなるバイオアクチュエータの開発に取り組んだ(図1)。

図1. 微細溝パターンを有するエラストマー薄膜と、配列した骨格筋細胞からなる バイオアクチュエータ
研究成果
本研究では、UVレーザー加工技術を用いて、エラストマー製の薄膜(厚さ:9 µm)にテーラーメイドの微細溝パターン(溝幅: 20 µm、1 µmは1,000分の1 mm)を形成した。具体的には、まずCADデザインに基づいてポリイミド基板上にUVレーザーを照射し(加工速度: 200 mm/sec、面積 15 mm四方)、微細溝パターンをおよそ2分程度で形成した。次に、微細溝が加工されたポリイミド基板を鋳型としてポリジメチルシロキサン(PDMS)を滴下し、熱硬化後にPDMSを剥離することで、微細溝パターンが転写されたPDMS片を得た。最後に、このPDMS片上にスピンコート法にてスチレン-ブタジエン-スチレンブロック共重合体(SBS)からなるエラストマーを製膜した(図2上段)。これにより、UVレーザー加工にて得られた微細溝パターンを転写したエラストマー薄膜を作製することができた。
続いて、直線、曲線状(曲率: 0.1-0.2 /mm) 、同心円状(半径: 10 mm) の微細溝パターンを転写したエラストマー薄膜に、マウス骨格筋組織由来の筋芽細胞を播種し、電気刺激による収縮運動が可能な多核細胞の筋管細胞へと分化させた。この時、筋管細胞は微細溝パターンに沿って、直線状か、曲率が制御された曲線状に配列することを見出した(図2下段)。
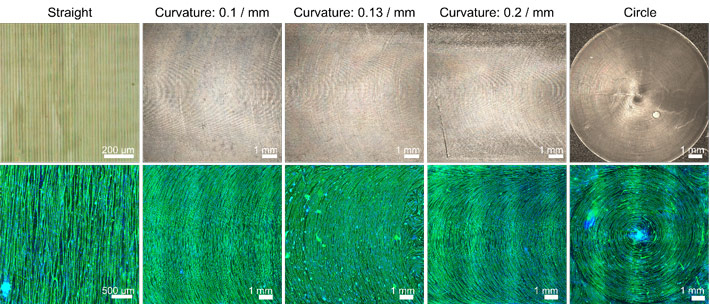
- 図2.
- (上)微細溝パターンを有するエラストマー薄膜と(下)微細溝パターンに沿って配列する筋管細胞のミオシン重鎖(緑) と細胞核(青) の蛍光染色画像。
次に、曲線状の微細溝パターンを有するエラストマー薄膜と、直線状および曲線状(0.1, 0.13 /mm)の微細溝に沿って配列させた筋管細胞からなる、薄膜状バイオアクチュエータ(寸法: 12 × 15 mm)を作製した。このバイオアクチュエータに電気刺激(40 V, 10-ms pulses, 0.3-1.0 Hz)を負荷し、筋管細胞の収縮を誘発したところ、刺激周波数に応じた収縮挙動を示した。作製したバイオアクチュエータの収縮挙動は、直線状に配列した筋管細胞では直線的な動きを示した。一方、曲線状に配列した筋管細胞ではひねり様の動きを示した(図3)。この時、バイオアクチュエータの左右の長辺の収縮変位を測定したところ、曲率 0.10 /mmの微細パターンを有するバイオアクチュエータの右辺においては、3.3 mm(0.3 Hz)の最大収縮変位を示した。続いて、左右の収縮変位の比を算出したところ、曲率とともに収縮変位比が増加することが示された(図4)。これらの結果は、配列した筋管細胞の曲率の増加に伴い、筋管細胞全体の収縮方向が薄膜の右辺側に向けて増大したためと考えられ、筋管細胞の曲率によってバイオアクチュエータのひねり運動を制御できることが示唆された。

図3. バイオアクチュエータを電気刺激した際の収縮挙動

図4. (a-c) バイオアクチュエータの収縮挙動における左右の収縮変位と(d)収縮変位比
社会的インパクト
本研究では、筋細胞の配列を曲線状に制御することでひねり様の動きを示すバイオアクチュエータを開発した。UVレーザー加工技術を用いれば、筋肉以外の生体組織特有の微細構造を迅速かつ簡便に形成することも可能である。今後は、心筋や括約筋に見られる複雑かつ異方的な細胞配列をより精密に再現することで、生体特有の複雑な動きを再現したソフトロボットや薬剤試験のための臓器チップの開発が期待される。
今後の展開
本研究により、UVレーザー加工を利用したバイオアクチュエータの作製手法を構築した。特筆すべき点としては、曲線状の微細溝を用いることで、生体組織に見られるひねり様の収縮挙動を実現することに成功したことが挙げられる。今後は、異なる配列を有する筋細胞を三次元的に積層することで、心筋や括約筋の構造を模倣したバイオアクチュエータを開発し、生体組織特有の複雑な動きの再現に取り組む。また当該技術は、筋細胞以外の細胞にも応用可能であるため、筋肉以外の異方的な生体組織の模倣にも有用と期待される。
付記
本研究は、文部科学省 科学研究費助成事業 新学術領域研究(研究領域提案型)「ソフトロボット学の創成:機電・物質・生体情報の有機的融合」(課題番号:18H05465,18H05468,18H05469)、基盤研究(B)(課題番号:21H03815)、科学技術振興機構(JST)創発的研究支援事業(課題番号:JPMJFR203Q)、および、日本医療研究開発機構(AMED) 令和4年度 「医療機器等における先進的研究開発・開発体制強靭化事業(基盤技術開発プロジェクト)」(課題番号:JP22he2202018)の支援を受けて行われた。
用語説明
[用語1] バイオアクチュエータ : 弾性のある材料で作製された柔らかなアクチュエータの中でも、バイオ材料を動力源とするもの。培養筋細胞が動力源として用いられることが多い。ソフトロボットの駆動力としても期待される。
[用語2] ソフトロボット : 柔らかなボディをもち、しなやかな動きを行う、柔軟性のある材料で構成されたロボット。生物のように周囲の環境変化に応じて身体の形状や動きを柔軟に変化させることができる。
[用語3] UVレーザー加工 : 波長が355 nmの紫外線(UV)を利用したレーザー加工。従来のレーザーに用いられる赤外線よりも、短時間で熱ダメージの少ない微細加工が可能。
[用語4] エラストマー : ゴムのような弾性をもつ柔らかい高分子材料。シリコーンやスチレンブタジエン共重合体が知られる。
[用語5] 臓器チップ : 血管を模した微細な流路をもつチップと細胞を組み合わせて、生体組織の複雑な機能や構造を再現したデバイス。動物実験を代替する新たな薬剤試験手法として期待される。
論文情報
掲載誌 : |
Biofabrication |
論文タイトル : |
UV Laser-Processed Microstructure for Building Biohybrid Actuators with Anisotropic Movement |
著者 : |
Hiroaki Mita, Yosuke Mizuno, Hiroto Tanaka, Toshinori Fujie |
DOI : |
- プレスリリース 「ひねり」の利いたバイオハイブリッドロボット —自在な細胞配列手法によりユニークな筋肉の動きを実現—
- ラップのように脳を優しく密に覆える薄膜電極を開発|東工大ニュース
- ペンギンが羽ばたいて旋回する遊泳メカニズムを解明|東工大ニュース
- ペンギンの体表は流体摩擦抵抗を低減|東工大ニュース
- ペンギンが翼をしなやかに変形させ、効率よく泳ぐメカニズムを解明|東工大ニュース
- 研究動画「温熱でがんをやっつける!医工連携による薄膜デバイス開発」を公開|東工大ニュース
- 臓器をピンポイントで温め、がん細胞をやっつける!厚さ7 µmの生体用薄膜デバイスを開発|東工大ニュース
- IHクッキングヒーターの仕組みを活かして臓器を非接触でピンポイントに温める|東工大ニュース
- ナノシート電極を用いた植物電位のライブモニタリングに成功|東工大ニュース
- 伸び縮みによって色が変化する伸縮性カラーシートの開発に成功|東工大ニュース
- 培養神経細胞の均一性を担保し、神経細胞の分化を安定的に促進させる手法を開発|東工大ニュース
- 藤枝俊宣講師と小宮健助教が第4回「バイオインダストリー奨励賞」を受賞|東工大ニュース
- 藤枝俊宣講師が日本生体医工学会 臨床応用研究賞・荻野賞を受賞|東工大ニュース
- 藤枝俊宣講師がバイオマテリアル・サイエンス誌の新進研究者2019に選定|東工大ニュース
- 藤枝俊宣 Toshinori Fujie|研究者検索システム 東京工業大学STARサーチ
- 田中博人 Hiroto Tanaka|研究者検索システム 東京工業大学STARサーチ
- 藤枝研究室
- 田中研究室
- 【研究室紹介】 藤枝研究室|生命理工学系 News
- 生命理工学院 生命理工学系
- 工学院 機械系
- 研究成果一覧



お問い合わせ先
東京工業大学 生命理工学院 生命理工学系
准教授 藤枝俊宣
Email t_fujie@bio.titech.ac.jp
Tel 045-924-5712 / Fax 045-924-5712
取材申し込み先
東京工業大学 総務部 広報課
Email media@jim.titech.ac.jp
Tel 03-5734-2975 / Fax 03-5734-3661